Team:Peking/Model
Overview
Background
In our design, after having designed the flip flop, the device can remember the information of its state, the next step is to transform the state into an actual function. To achieve this transformation, we first needed a “reader” to read out the current state. At this point the control unit comes into play. A control unit is a DNA sequence with recombinase sites whose expression is controlled by recom-binase and RDF by reversing or deleting a promoter and/or a terminator. To make the control unit reliable and predictable, we first need to be able to predict the behaviors of its “building blocks” (or “elements” in electrical engineering), from which we weave our engineer’s perspective into the biolog-ical system. However, we need to make some adaptations and adjustments to these “elements” to make them usable.Intention of the Model
We attempts to develop a framework of biological sequential circuits that are programmable. The envisioned circuit is capable of both storing states in DNA and automatically running a series of instructions in a specific order. According to our design, our bio-flip-flop has two promoters, each triggered by an inducing signal. Therefore, if we would like to build an automatic triggering system for the bio-flip-flop, we need at least two signals in our clock. It is then self-evident to incorporate the classic structure in synthetic biology: the repressilator.This model serves as a proof of concept for such implementation. We first constructed an ordinary differential equation (ODE) system to describe the repressilator, then we used two repressor proteins expressed by the repressilator to regulate the two promoters. Finally we adjusted parameters and gave a simulation result as a proof of the possibility of repressilator-driven bio-flip-flop.
Biological Basis and Assumptions
The repressilator is a synthetic genetic regulatory network consisting of a ring-oscillator with three genes, each expressing a protein that represses the next gene in the loop.[^Footnote1] This network was designed from scratch to exhibit a stable oscillation which is reported via the expression of green fluorescent protein, and hence acts like an electrical oscillator system with fixed time periods. The repressilator consists of three genes connected in a feedback loop, such that each gene represses the next gene in the loop, and is repressed by the previous gene.
Fig.1. The genetic structure of the repressilator network
We decided to implement our repressilator-triggered bio-flip-flop with two repressor proteins regulating the two promoters’ transcription. The basis of ODE system construction is illustrated as follows:
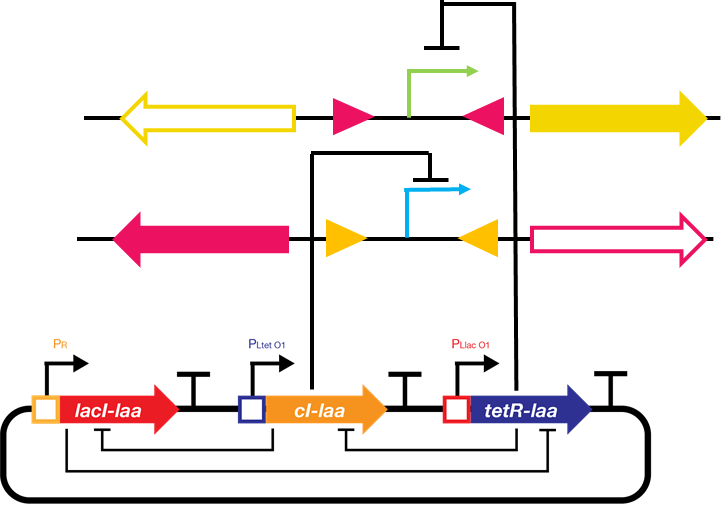
Fig.2. Schematic drawing of the repressilator-driven bio-flip-flop
The upper promoter (X) is \(P_{LtetO}\) and is repressed by tetR protein. The lower promoter (Y) is \(P_{R}\) and is repressed by cI protein.Simulation of bio-flip-flop starts at a later time than repressilator because the expression levels of the repressor proteins at the beginning is not high enough.
Equations and Parameters
Repressilator
The following table lists the reactions in the repressilator network. X, Y, Z represent LacI, TetR and cI mRNAs, and PX, PY, PZ represent the corresponding proteins.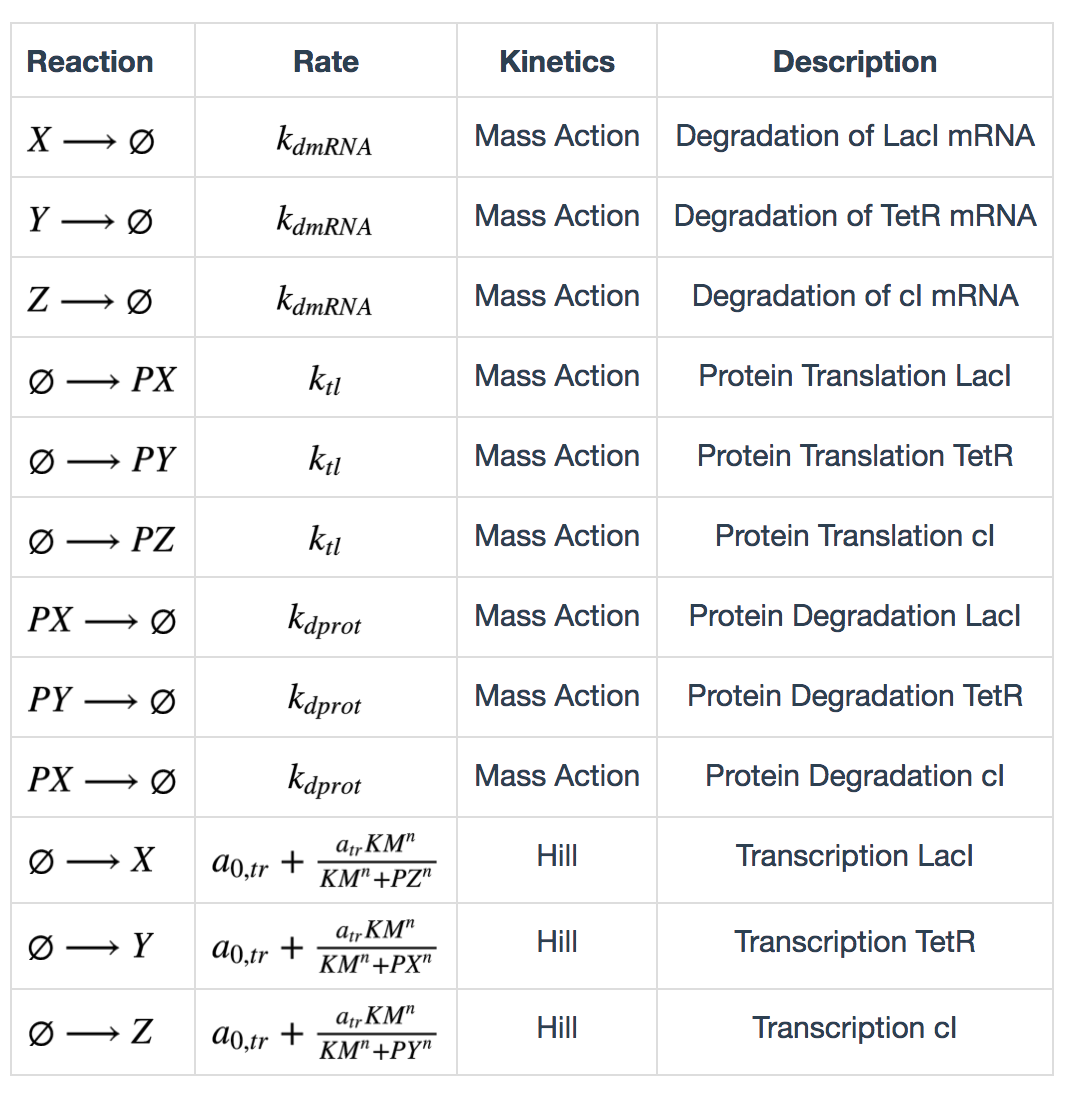
Calculation of degradation rates are described as follows: \[ k_{dmRNA} = \frac{ln(2)}{\tau_{mRNA}} \] \[ k_{dprot} = \frac{ln(2)}{\tau_{protein}} \] \(\tau_{mRNA}\) and \(\tau_{protein}\) are half lives of mRNA and protein. Calculation of maximum transcription rate: \[ a_{tr} = 60(ps_a - ps_0) \] \(ps_a\) is “tps active” and \(ps_0\) is “tps_repressive”. Calculation of translation rate: \[ k_{tl} = \frac{eff}{t_{ave}} \] \(eff\) is translation efficiency and \(t_{ave}\) is average mRNA life time. \(t_{ave} = \frac{\tau_{mRNA}}{ln(2)}\)
Transcription in bio-flip-flop
The transcription kinetics in the bio-flip-flop were modified to be repressed by repressors. These can be described by the following equations: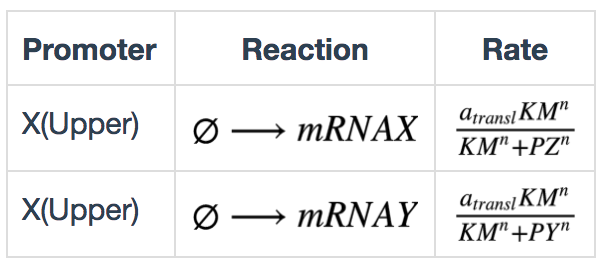
Simulation Results
We conducted our simulation using Tellurium[^Footnote3], a Python-based simulation platform. We first adjusted the parameters protein half life and mRNA half life (equivalently transcription and translation of repressor proteins) to adjust oscillation period as the one observed in the experiment. (此处链接到clock实验)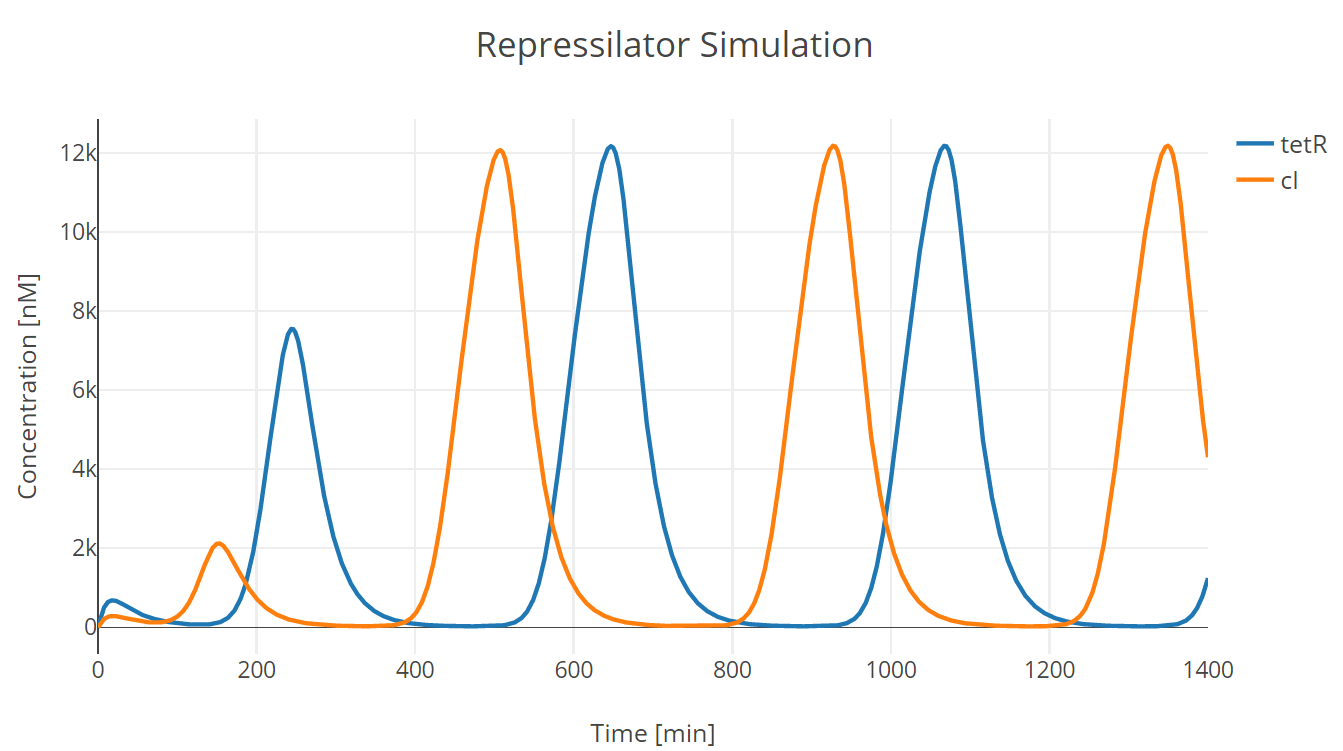
Fig.1. Repressilator simulation results of tetR and cI protein
Then we incorporate the bio-flip-flop into the model, and we got the following simulation results:
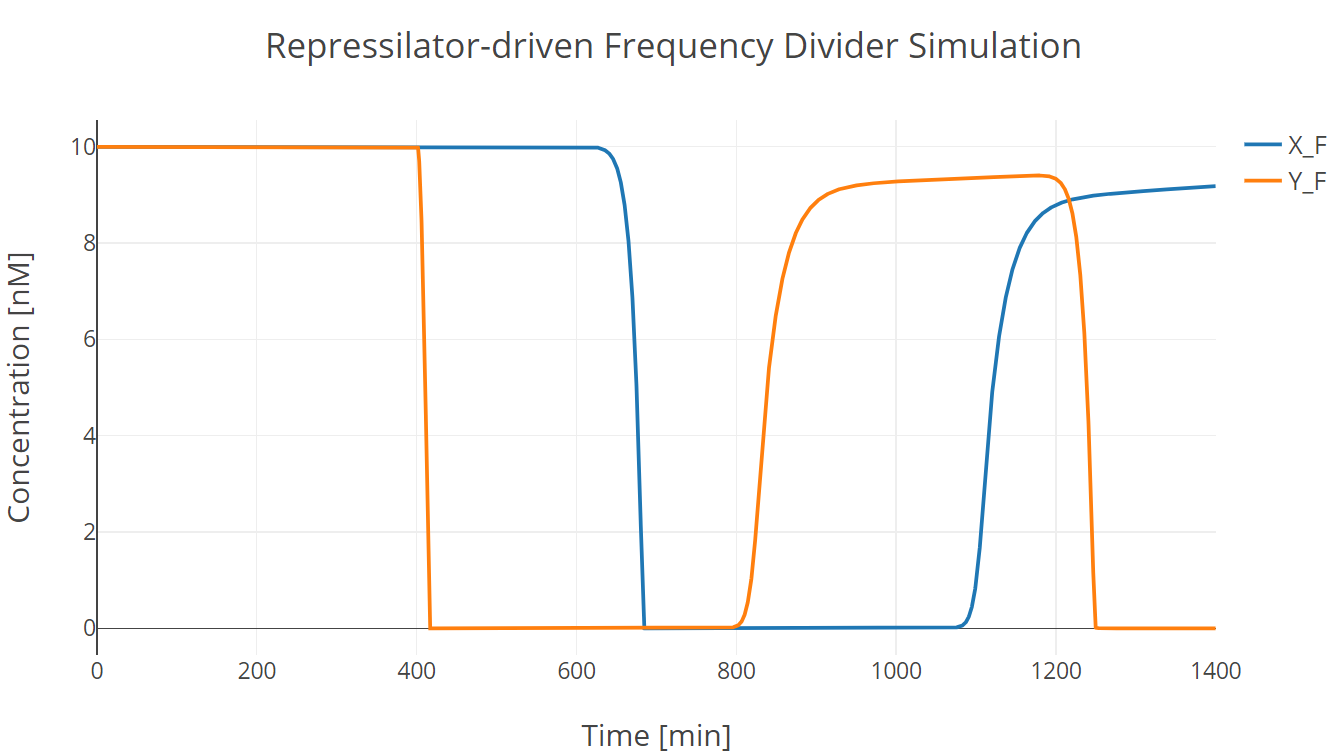
Fig.2. Repressilator-driven frequency divider simulation with two trigger signal groups
X_F and Y_F have the same meaning as those described in Recombinase section. (此处有超链接到第一个model子页面)
In this simulation experiment, the flip-flop lost approximately 10% of its initial state after two trigger signal groups.